#1. Which of the following sentences are true in Denavit-Hartenberg notation? Choose all correct answers:
Select all that apply:
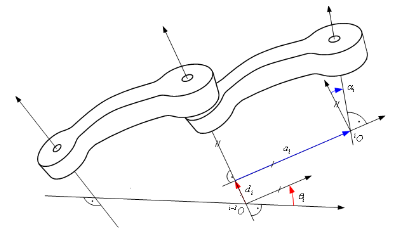
#2. This figure shows the use of the D-H notation for the joints and links of the manipulator. Select all true sentences.
Select all that apply:
#3. The homogeneous transformation matrix…
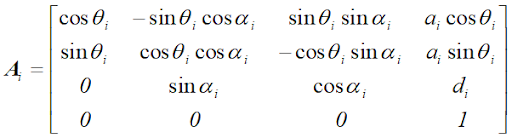
#4. The homogeneous transformation matrix (shown below), describing the single joint of the manipulator, …
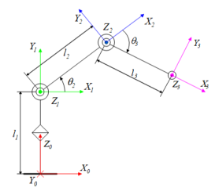
#5. For the scheme shown below (application of the coordinate frames according to D-H notation) which parameter is measured along the X2 axis?
#6. The URDF format can describe:
#7. After analysing the URDF model provided in [10], do you think that authors are strictly following the transformations according to D-H notation?
Results
Good job! Click on the button below to get the certificate for this module.
Oh no, nice try!



